플라이메이플 -10자유도 플라잇 컨트롤러
(Flymaple-A flight controller
with 10 DOF IMU)
개요
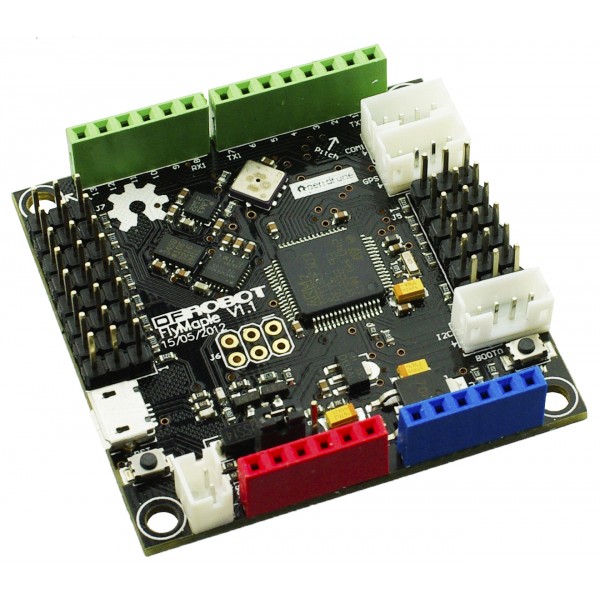
- Flymaple은 Maple 프로젝트 기반의 쿼드콥터 컨트롤러보드입니다.
- STM32F103RET6 ARM cortex M3 마이크로컨트롤러를 탑재하였으며, 3축 가속도계, 3축 자이로스코프, 3축 컴파스 및 대기압 센서를 장착하였습니다.
- 이러한 10 자유도의 IMU 센서와 72Mhz의 고성능 마이크로컨트롤러가 Flymaple을 로봇의 움직을을 관리하고 복잡한 알고리즘을 처리하는데 적합하게 합니다.
- Flymaple은 Maple(아두이노 스타일 ARM 프로세서)기반으로 만들어 졌으며, Maple IDE를 사용할 수 있어 프로세싱이나 아두이노 IDE사용자는 마치 집에 온것 같은 기분을 느낄 것입니다.
- 아두이노 IDE를 사용하여 보셨다면 Maple IDE는 매우 쉽게 시작할 수 있습니다.
- Flymaple은 쿼드콥터, 헬리콥터, 이동로봇, balancing robot 등 IMU 기능과 고성능 실시간 마이크로컨트롤러가 필요한 어플리케이션에서 동작하도록 디자인 되었습니다.
- 아두이노 쉴드와 호환되기 때문에 확장성이 좋습니다.
- Flymaple은 6개의 PWM 채널와 8개의 GPIO를 지원하여 ESC/Servo 제어 및 RC 리시버로부터의 입력을 캡쳐하는데 사용할 수 있습니다.
-
Applications
- Aircraft
- Balancing robots
- Indoor inertial navigation
- Altimeter
특징
- Working Voltage: 5v
- STM32 Operating Voltage: 3.3v
- 7~12v External Power supply from the 2p JST connector
- Output Voltage: 3.3v/5v or External input power
- Microcontroller: STM32F103
- Running at 72Mhz with 32bit Arduino sytle ARM processor(Cortex-M3)
- Bootloader: Leaflabs Maple RET6 Edition
- 10 Degrees of Freedom on a single, flat board:
- ITG-3200 - triple-axis digital-output gyroscope
- ADXL345 - 13-bit resolution, ±16g, triple-axis accelerometer
- HMC5883L - triple-axis, digital magnetometer
- BMP085 - high-precision barometric pressure sensor
- Programable through an Arduino-based development environment - Maple IDE
- Compatible with most of Arduino shields
- Extends 6 channels PWM pins for controlling ESC/Servo
- Extends 8 channels GPIO for capturing RC receiver output
- 3x 4p JST connectors:
- Serial port 1
- GPS extension port
- I2C interface
- Size: 50x50x12mm
- Weight: 15g
- Envionment Friendly: Rohs Compliance
구성품
- Flymaple v1.1 1 unit
문서
Related links
Reviews