

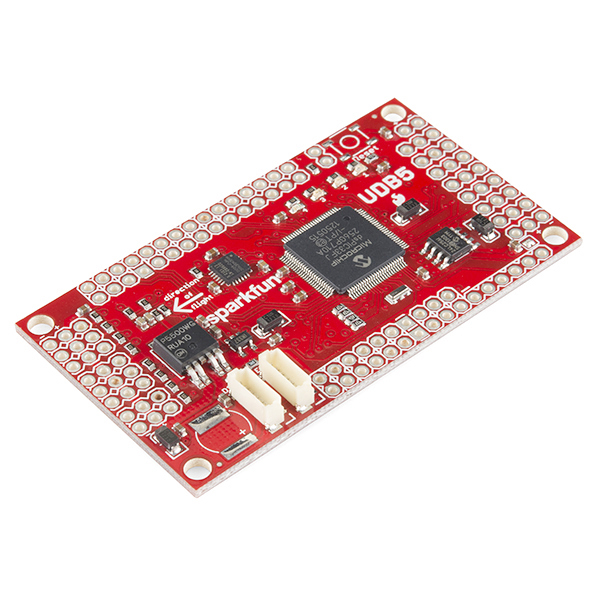
UDB5 - PIC UAV 개발보드
(UDB5 - PIC UAV Development Board)
개요
- 본 UDB5 (UAV Development Board version 5) 개발보드는 dsPIC33FJ256 마이크로컨트롤러, MPU-6000, MEMS 3축 자이로스코프, 3축 가속도계를 탑재한 제품으로 UAV 개발에 사용 가능한 개발보드입니다.
- 탑재된 자이로스코프는 RC 헬리콥터 어플리케이션에 사용될 수 있을 정도로 진동에 충분히 강합니다.
- 보드자체로 3축 IMU 컨트롤러를 개발하기 위해 사용이 가능합니다.
- EM406 이나 D2523T GPS 리시버를 추가하면 RC 자동차나, 비행기, 핼리콥터, 보트 등을 위한 UAV 컨트롤러를 개발하는데 사용할 수 있습니다.
- 제품에는 self-testing 펌웨어가 있어 새로운 펌웨어 개발시 참고할 수 있습니다.
- 완전히 동작하는 오픈 소스 autopilot 펌웨어가 사용이 가능합니다.
- 원하신다면 리셋버튼 및 0.2F 슈퍼 캐패시터를 추가할 수 있습니다.
- 알림: dsPIC33을 프로그래밍하기 위해서는 프로그래머가 필요합니다.
- 알림: GPS모듈은 포함되어 있지 않습니다.
특징
- compatible with 20-channel EM-406A SiRF III GPS
- compatible with 48-channel EM-506 GPS with SiRF Star IV chipset
- compatible with 50-channel GS407 Helical GPS
- dsPIC33FJ256GP710A Controller (with onboard 3.3V and 5V glue logic)
- dsPIC runs at 80MHz (40 MIPS) with 8MHz resonator and PLL
- MPU-6000 MEMS 3-axis gyroscope and 3-axis accelerometer
- External 256Kbit EEPROM
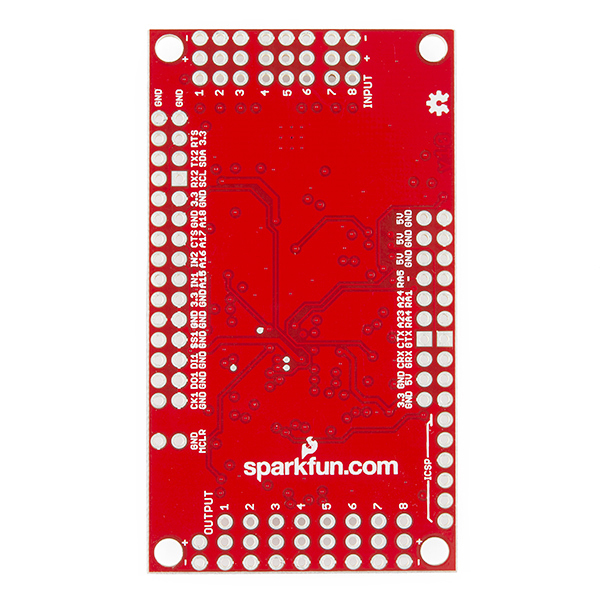
- Up to 8 Input, 8 output PWM points
- 6-wire debug header or ICSP header
- 4 separate colored status LEDs
- On board 3.3V and 5V regulators (150mA max)
- Spare USART connection for debugging, flight logging, wireless telemetry, etc.
- I/O pins include a CAN, an I2C, and a SPI port
- 30 spare analog and digital I/O pins for debugging and interfacing to sensors
문서
- Schematic
- Eagle Files
- GitHub Hardware Files
- Datasheet (MPU-6000)
- MatrixPilot Firmware Home
- MatrixPilot Firmware Downloads
- DIYDrones UDB Page
- DIYDrones UDB Article (how the UDB handles sustained rotations)
연관제품
- 연관제품 1

