int encoder_pin = 2; // The pin the encoder is connected
unsigned int rpm; // rpm reading
volatile byte pulses; // number of pulses
unsigned long timeold;
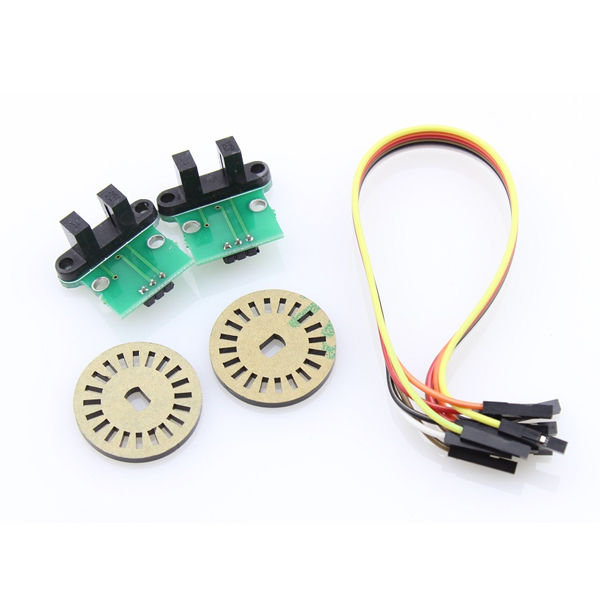
// The number of pulses per revolution
// depends on your index disc!!
unsigned int pulsesperturn = 20;
void counter()
{
//Update count
pulses++;
}
void setup()
{
Serial.begin(9600);
//Use statusPin to flash along with interrupts
pinMode(encoder_pin, INPUT);
//Interrupt 0 is digital pin 2, so that is where the IR detector is connected
//Triggers on FALLING (change from HIGH to LOW)
attachInterrupt(0, counter, FALLING);
// Initialize
pulses = 0;
rpm = 0;
timeold = 0;
}
void loop()
{
if (millis() - timeold >= 1000){ /*Uptade every one second, this will be equal to reading frecuency (Hz).*/
//Don't process interrupts during calculations
detachInterrupt(0);
//Note that this would be 60*1000/(millis() - timeold)*pulses if the interrupt
//happened once per revolution
rpm = (60 * 1000 / pulsesperturn )/ (millis() - timeold)* pulses;
timeold = millis();
pulses = 0;
//Write it out to serial port
Serial.print("RPM = ");
Serial.println(rpm,DEC);
//Restart the interrupt processing
attachInterrupt(0, counter, FALLING);
}
}