컴퓨터 비젼을 전문으로 처리하여 주는 프로세서를 연결하고 아두이노는 처리된 데이터를 받는 것이 한 방법입니다.
CMUcam은 이러한 방식으로 컴퓨터 비젼을 처리하는 프로그래밍 가능한 임베디드 컴퓨터 비젼 센서입니다.
메인 프로세서는 parallax P8X32A(propeller chip)이며 이 칩은 OmniVision 9665 CMOS카메라 모듈에 연결되어 있습니다.
CMUcam4는 색깔을 추적하고 기본적인 이미지 통계자료를 수집하는데 사용이 될 수 있습니다.
CMUcam4은 색 대비가 명확하고 강한 컬러를 가진 물체를 처리할때 성능이 극대화 됩니다.
예를들어 하얀색 배경에 빨간 공을 추적하는 것은 쉽게 할수 있지만 비슷비슷한 색은 구별하기가 어렵습니다
색이 있는 물체를 추적하는 것은 랜드마크의 위치를 파악하거나, 라인을 따라가거나, 움직이는 물체를 따라가는 등의 어플리케이션에 사용이 가능합니다.
CMUcam4가 어떤 지역을 관찰하다, 특정 색을 검출하거나 움직임을 검출하는데 사용할 수 있습니다.
"line mode"를 사용함으로서 CMUcam4는 색있는 물체에 대한 저해상도 바이너리 이미지를 생성할 수 있는데
이것은 모양 인식이나, line following with branch detection등의 좀더 복잡한 이미지 프로세싱에 사용될 수 있습니다.
CMUcam4에서 바이너리 이미지가 수신되면 수신측에서 이미지를 프로세싱하는 사용자의 알고리즘이 필요한 작업입니다.
CMUcam4의 일반적인 설정은 마스터 프로세서와 표준 TTL시리얼 포트를 통해서 통신하는 것입니다.
이 마스터 프로세서는 컴퓨터가 될수도 있고 아두이노, 혹은 PIC 마이크로컨트롤러가 될수도 있습니다.
복잡한 비젼 시스템을 처리하기 힘들거나 작은 비젼 시스템이 필요한 임베디드 장치에 CMUcam4는 간단한 비젼시스템을 부가 할 수 있게 하여 줍니다.
CMUcam4의 통신 프로토콜과 보오드 레이트는 가장 느린 프로세서와도 통신할 수 있게 디자인 되었습니다.
속도가 느린 프로세서를 위해, CMUcam4는 "poll mode"로 동작이 가능하며,
이 모드에서 호스트 프로세서는 CMUcam4에게 싱글 패킷 데이터를 요청하는 것이 가능하여 느린 프로세서도 쉽게 데이터와 동기화 되는 것이 가능합니다.
또한 "delay mode"명령를 이용하여 각각의 시리얼 데이터 문자 사이에 딜레이를 추가하는 것이 가능합니다.
통신 딜레이때문에, poll mode와 delay mode 모두 전체 프레임의 수를 낮추어 줍니다.
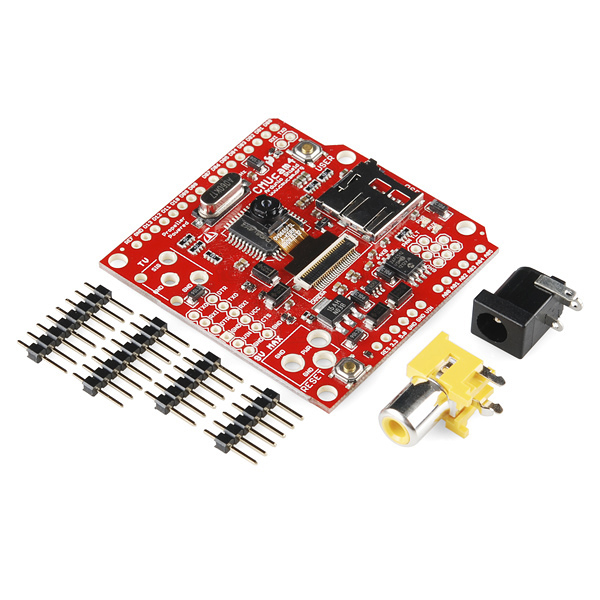
RCA와 배럴 잭은 설치시 카메라 비젼을 가릴 수 있기 때문에 남땜 되지 않았습니다.
그리고 서보 파워 버스는 기본적으로 연결이 끊어져 있습니다.
연결이 필요하면 보드 뒷면의 'Servo EN' 점퍼를 연결하여 Pan/Tilt 서보를 활성화 시키십시오.
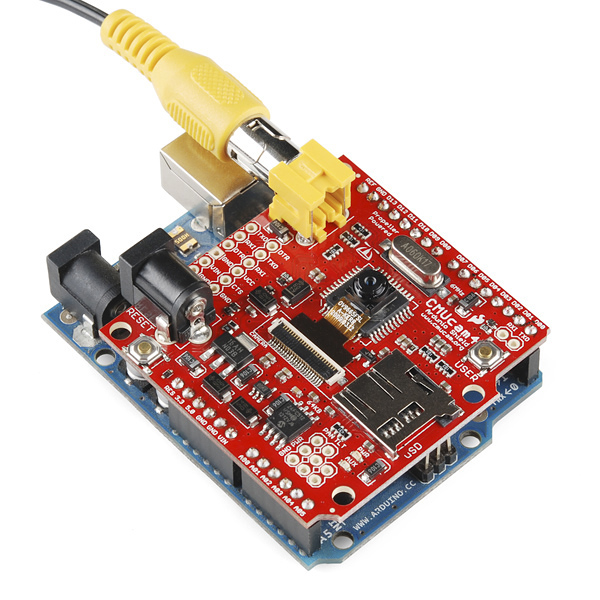
CMUcam 쉴드가 연결된 상태에서 아두이노를 프로그래밍하려면, 'HALT' feature를 사용하거나 시리얼 점퍼(SJ4, SJ5)의 연결을 끊고 two pin header(J1)을 아두이노 디지털 핀중에 하나와 연결하십시오. 그리고 SoftwareSerial library를 사용하십시오.
특징
Fully open source and re-programmable using the Propeller Tool
Arduino Shield Compatible
w/ Supporting Interface Libraries and Demo Applications for the Arduino and BASIC Stamp
VGA resolution (640x480) RGB565/YUV655 color sensor
Track user defined color blobs in the RGB/YUV color space
Mean, median, mode and standard deviation data collection – sampled from a 40x120 resolution
Segmented (thresholded) image capture for tracking visualization (over serial or to flash card)
80x60 image resolution
Monochrome color space
Histogram generation (up to 128 Bins) – sampled from a 40x120 resolution
Arbitrary image clipping (windowing)
µSD/µSDHC flash card slot with FAT16/32 full file system driver support
w/ Directory and File manipulation
I/O Interfaces
Two-port servo controller (pan and tilt w/ 1us resolution at a 50 Hz refresh rate)
Pan and/or Tilt servo channels can be configured as GPIOs
Indicator user controllable LED (red) and power LED (green)
TTL UART (up to 250,000 baud – 19,200 baud by default)
Monochrome baseband analog video output (NTSC/PAL) of 160x120 resolution for tracking visualization (segmented (thresholded) image w/ color centroid and bounding box overlay at 30 FPS)