라즈파이로봇 보드
(RaspiRobot Board)
개요
- 라즈베리파이는 작은 크기에도 훌륭한 프로세싱 파워를 가지고 있어 로봇의 컨트롤러로 쓰기에 적합합니다.
- 다만 라즈베리파이는 많은 로우 레벨 하드웨어 주변장치를 가지고 있음에도 모터 컨트롤러와 같은 모듈은 가지고 있지 않다는 점이 로봇 컨트롤러로 쓰기에 애로 사항이 있는 문제점입니다.
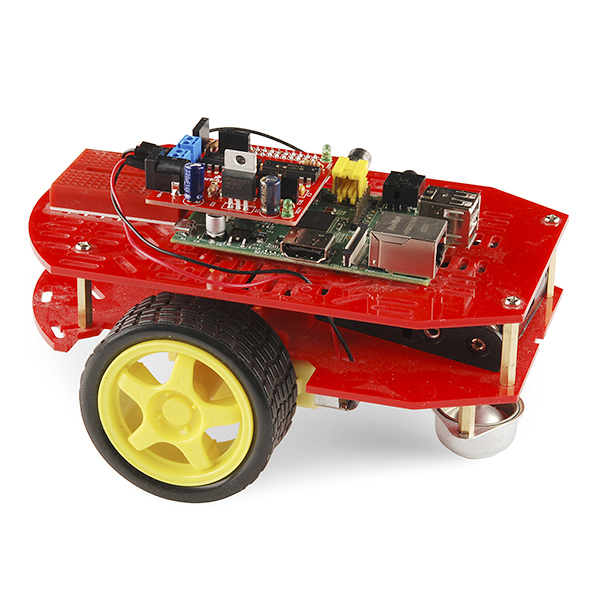
- 그러한 이유로 만들어진 제품이 본 라즈파이로봇 보드로, 라즈베리파이와 결합하여 라즈베리파이를 로봇 컨트롤러로 변환하여 줍니다.
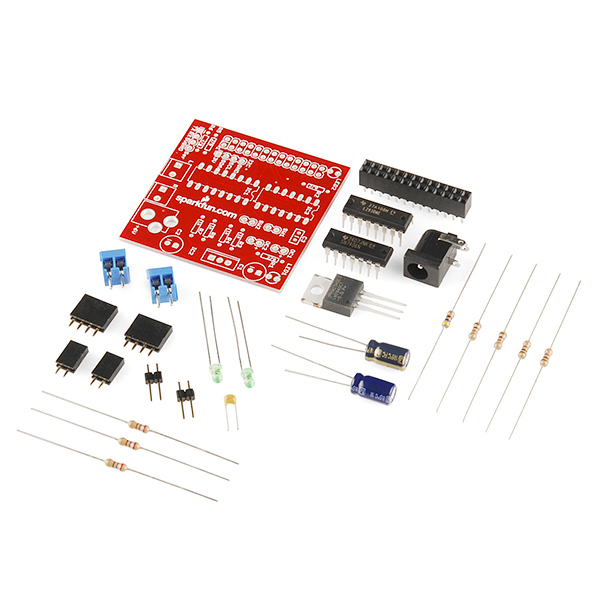
- 본 제품은 키트 형태의 제품으로 납땜 및 조립이 필요합니다. 조립가이드는 아래의 문서 섹션을 참고하십시오.
- 조립을 마치고 제품을 라즈베리파이의 GPIO 포트에 꼽으면 됩니다.
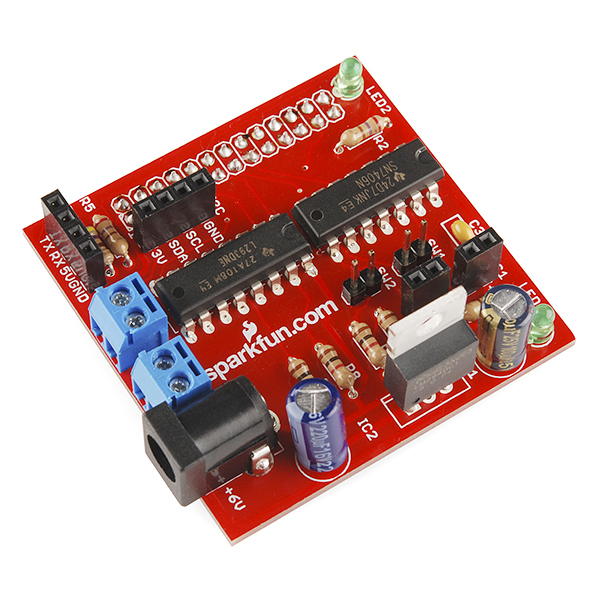
- 본 제품은 듀얼 양방향 모터 컨트롤러, 두개의 오픈 콜렉터 출력, 두개의 스위치 입력, 상태 LED, 7-12VDC의 배터리를 정류하여 라즈베리파이에 공급하여 주는 전압 레귤레이터를 지원합니다.
- 파이썬 라이브러리 모듈이 로봇 하드웨어를 쉽게 인터페이스 할 수 있게 만들어 줍니다.
- 라즈베리파이와 라즈파이로봇 보드 결합은 리눅스와 파이썬 코드를 사용하여 컴퓨터 비전 로봇이나 머신 러닝 로봇 등을 좀 더 쉽게 만들 수 있게 합니다.
- 알림: 본 제품은 키트 형태의 제품으로 조립이 필요합니다. 생산로트에 따라 PCB 외관에 차이가 있을 수 있습니다.
특징
- Dual Bi-directional Motor Control
- Voltage Regulator powers Raspberry Pi from Batteries (7-12V)
- 2 x Open collector outputs (25mA)
- 2 x LEDs
- 2 x Switch inputs
- 5V Serial connector
- 3.3V I2C connector
- Simple to use Python library module
문서
연관제품