PMW3901 광학 플로우 센서 -표면 움직임 검출
(PMW3901 Optical Flow Sensor Breakout)

개요
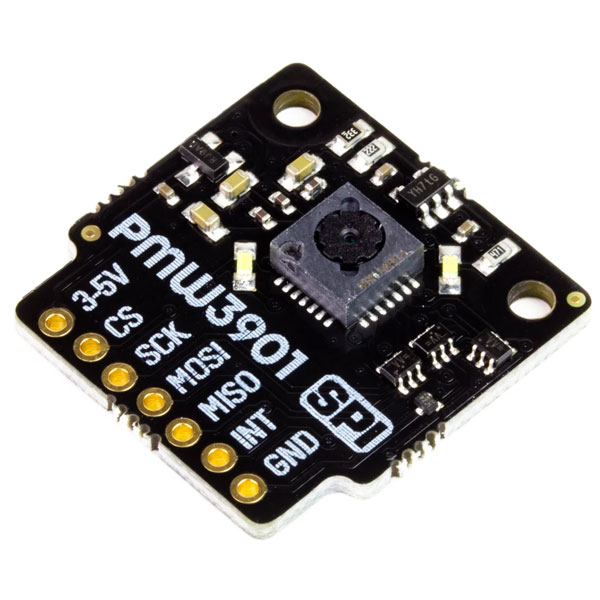
- 본 제품은 PMW3901 광학 플로우 센서입니다.
- 표면의 움직임을 검출할 수 있는 센서로 드론 제작시 많이 사용하는 제품입니다.
- 센서는 낮은 해상도의 카메라와 표면의 움직임을 검출하는 알고리즘을 이용하여 동작하게 되어 있으며,
- 땅의 x/y 좌표상 움직임을 찾아서 드론의 드리프트를 검출하고 교정하는데 자주 사용됩니다.
- SPI 인터페이스를 가지고 있으며, 3.3V/5V 시스템과 사용이 가능합니다.
특징
- PMW3901 optical flow sensor
- Two white LEDs on-board for illumination
- Frame rate: 121 FPS (frames per second)
- Speed: 7.4 rad/s (radians per second)
- Field of view: 42°
- Range: ~80mm to infinity
- 6mA typical current draw
- SPI interface
- 3.3V or 5V compatible
- Reverse polarity protection
- Compatible with all models of Raspberry Pi and Arduino
- Python library
문서
-
Software
We've put together a Python library to use with your Optical Flow Sensor Breakout. It makes reading the x/y motion values and their magnitude really straightforward.
Connecting to your Raspberry Pi
If you're not using our Breakout Garden HAT with SPI, then this is how to connect your Optical Flow Sensor Breakout up to your Raspberry Pi.
Our library is set up to use SPI 0 on the Pi: BCM 8 for CS, BCM 11 for SCK, BCM 10 for MOSI, BCM 9 for MISO, and BCM 18 for the INT pin.
Here's which pins to connect between your Optical Flow Sensor Breakout and your Pi's GPIO (note that it's BCM pin numbering):
- 3-5V to any 5V or 3V pin
- CS to BCM 8
- SCK to BCM 11
- MOSI to BCM 10
- MISO to BCM 9
- INT to BCM 18
- GND to any ground pin
You can of course use other pins with your MISO to BCM 9, but you'll have to change them accordingly when you instantiate the sensor in your code.
Notes
Dimensions: 24x24x5mm