로버 5 모터 드라이버 보드
(Rover 5 Motor Driver Board)
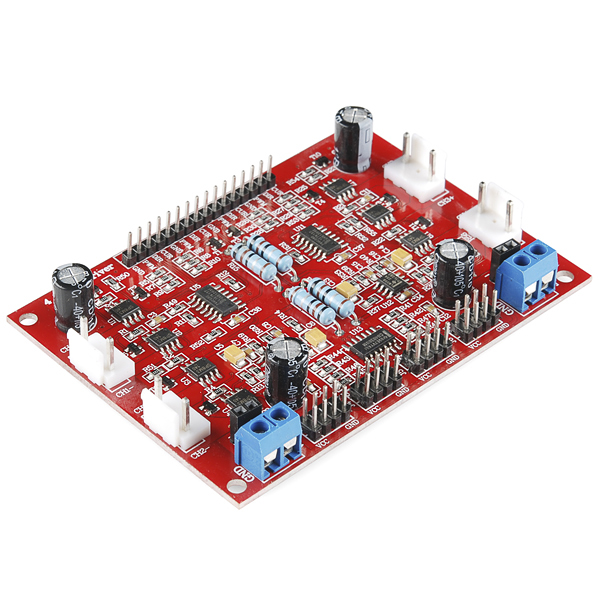

개요
- 본 모터 드라이버 보드는 4개의 바퀴를 가진 로봇에 적합한 제품으로
- 4개의 모터 출력, 4개의 인코더 입력과 각 모터에 대한 전류 감지를 지원합니다.
- 모터 드라이버는 로직 0 혹은 1을 모터의 direction pin에 줌으로써 또 PWM신호를 speed pin에 줌으로써 제어가 가능합니다.
- 이런 방법으로 4개의 다른 모터의 속도와 방향을 8개의 GPIO핀만을 이용하여 제어가 가능합니다.
- 드라이버보드의 인코더 입력은 각각의 인코더 입력을 XOR 시켜 quadrature encoder의 두개의 입력을 하나의 인터럽트 핀만을 이용하여 읽을 수 있습니다.
- 센서 출력을 읽는 것은 쉽습니다. 각각의 전류센서 핀은 해당 모터가 사용한 매 1A마다 약 1V를 출력합니다.
- 전류 센서 핀을 컨트롤러의 아날로그 입력 핀에 연결하면 stall을 검출하고 다른 모터 문제를 검출할 수 있습니다.
- 보드에는 두개의 파워 커넥터가 있습니다. 하나는 5V logic이고 다른 하나는 모터 전원입니다.
- 모터에 전원을 인가하기 전에 보드에 로직전원을 먼저 공급하는 것을 잊지 마십시오.
- 보드의 모터 최대 전압은 12V등급입니다.
특징
- 4 x Low Resistance FET “H” Bridges
- Each Channel Rated for 4A Stall Current
- Easy-to-Use Control Logic
- Current Monitoring for Each Channel.
- Quadrature Encoder Mixing Circuitry
구성품
- 4 Channel Motor Driver Board
- Mounting Hardware
문서

